When you run the calibration example source code, some information will ask you.
First question is to ask number of width corner points.
Second question is to ask number of height corner points.
Third question is to ask number of pattern boards.

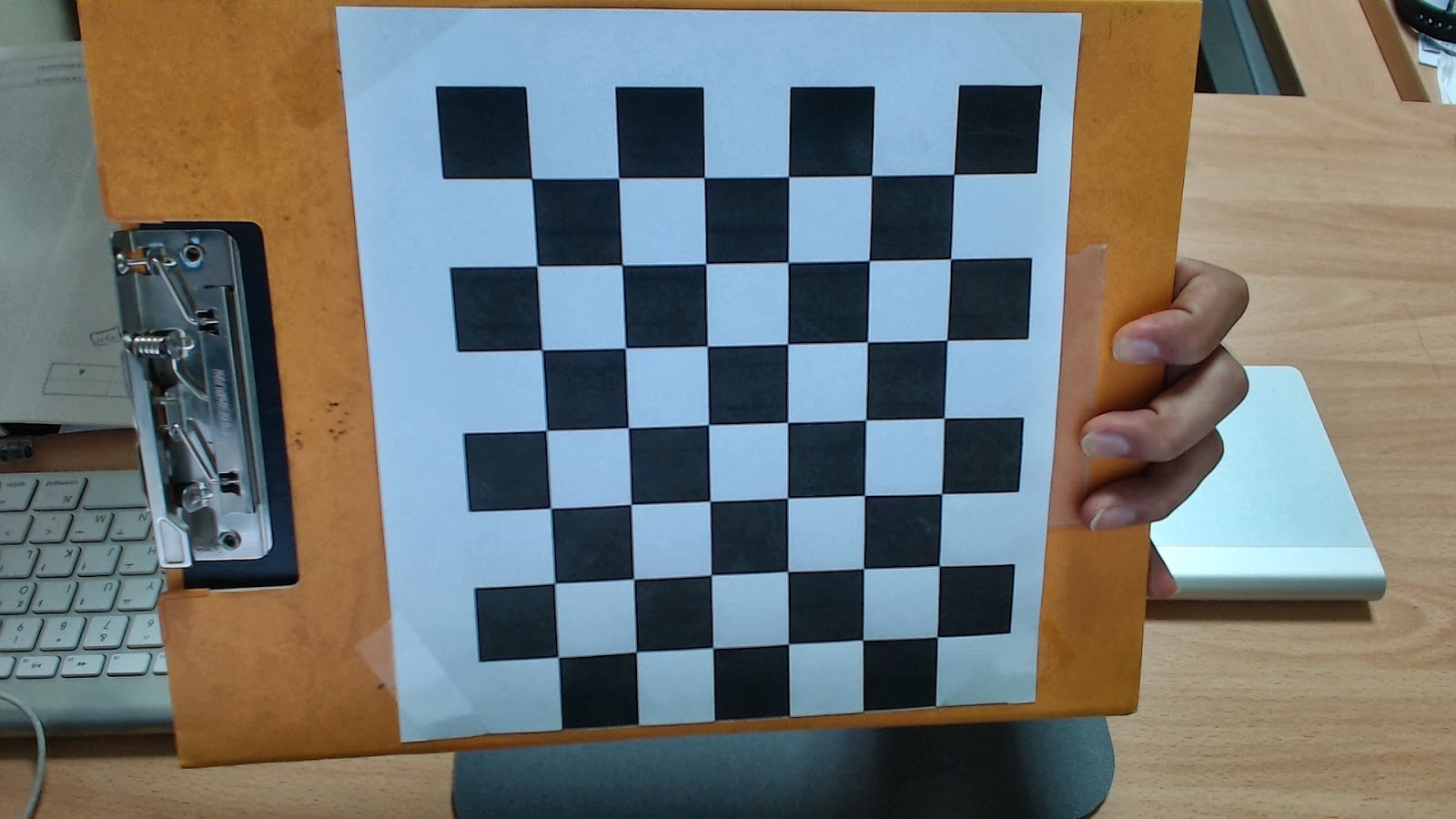
Because I use this chess board pattern, the answers is as follows

Of course, you have to prepare the captured images of chess pattern.
The source code detect corner points and calibration will be performed.
This function 'findChessboardCorners' is used to detection corners.
And 'calibrateCamera' function is used to get calibration parameters.
This is calibration example source code.
//code start
//code end
After calibration, the source code save ->
distortion_coeffs.txt
intrinsic.txt
rotation.txt
translatioin.txt
imagept.txt
objectpt.txt
and
The result images of corner detected.











This is matlab source code.
To confirm the result of calibration, I draw 2D image coordinate point to the 3D space.
m=[R|t]M or m=[R|-Rc]M
m is camera origin axis based coordinate.
M is world origin axis based coordinate.
In the -Rc, c is translate vector based on world origin axis.

pattern axis based
The equation is like this
R'(m-t)=M
In the equation, m is camera line coordinate for drawing.
M is camera coordinate based on pattern axis.

camera axis based, pattern position in 3D
The equation is like this
m=R*M+t or m=[R|t]M
In the equation, M is pattern coordinate for example -> [0 0 0; 10, 0 0; 0 10 0; 10 10 0] or
R is rotation 3x3 matrix, t is 3x1 translation matrix.
After calibration, we can get each R,t of pattern boards.
m is pattern 3D coordinate based on camera origin axis.
The main m file is Sapce2D3D.m in matlab files.
//matlab code start
//matlab code end
You can download calibration source code and matlab code in here.





ReplyDeletecan you plz Sir send me the source code to my email :
yahyaalkhaldi@yahoo.com
Hello yahya,
ReplyDeleteYou can use the example source code copy and paste.
plz refer to post contents.
Thank you.
Hi,
ReplyDeleteYou have done fabulous work.I'm working in character recognition project.I'm new to OPEN CV and i'm stuck at creating a classifier (say SVM or neural networks). And to segment joint characters based on horizontal histogram. Can you help me with that?
If you want to know SVM and MLP, I recommend Mastering OpenCV with Practical Computer vision projects book. In chapter 4, the book introduce SVM, MLP method for recognize APNR.
ReplyDeleteAnd plz give me your problem details. Then I will post the issue on the blog and I will try to solve your problem.
Thank you very much.
Hi,
ReplyDeleteGreat work ! well done. I simply need to know how you use the parameter "measure" and what it refers to? thanks
Regards